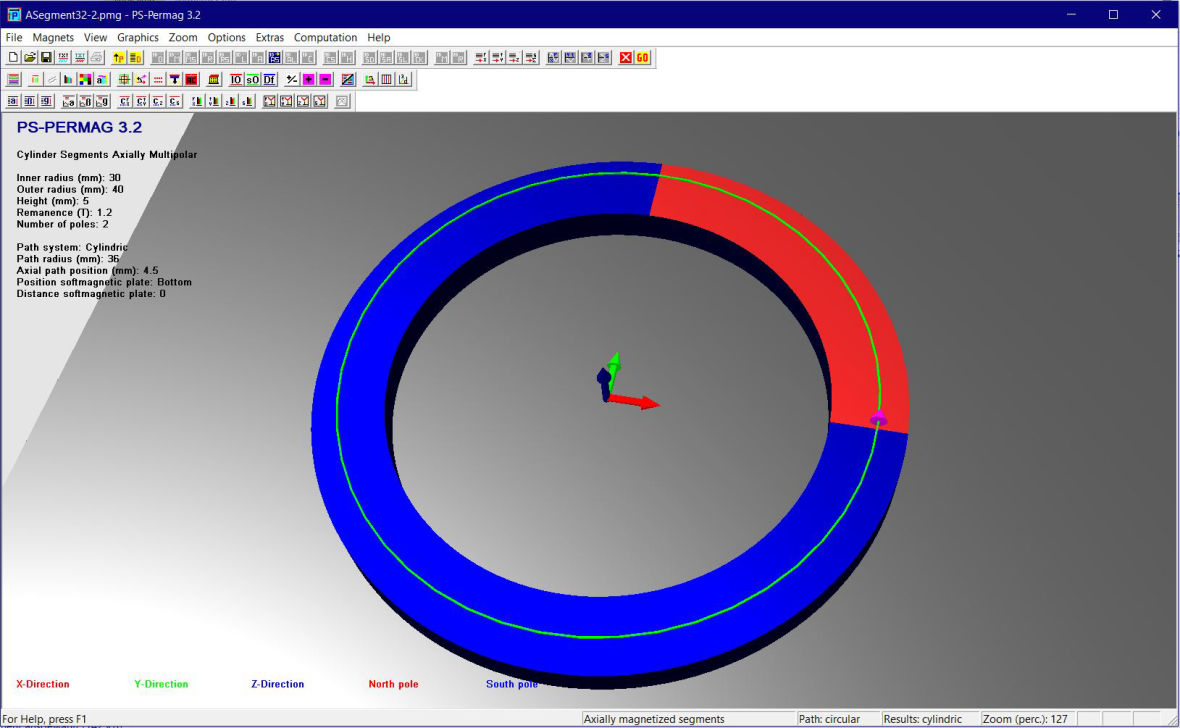
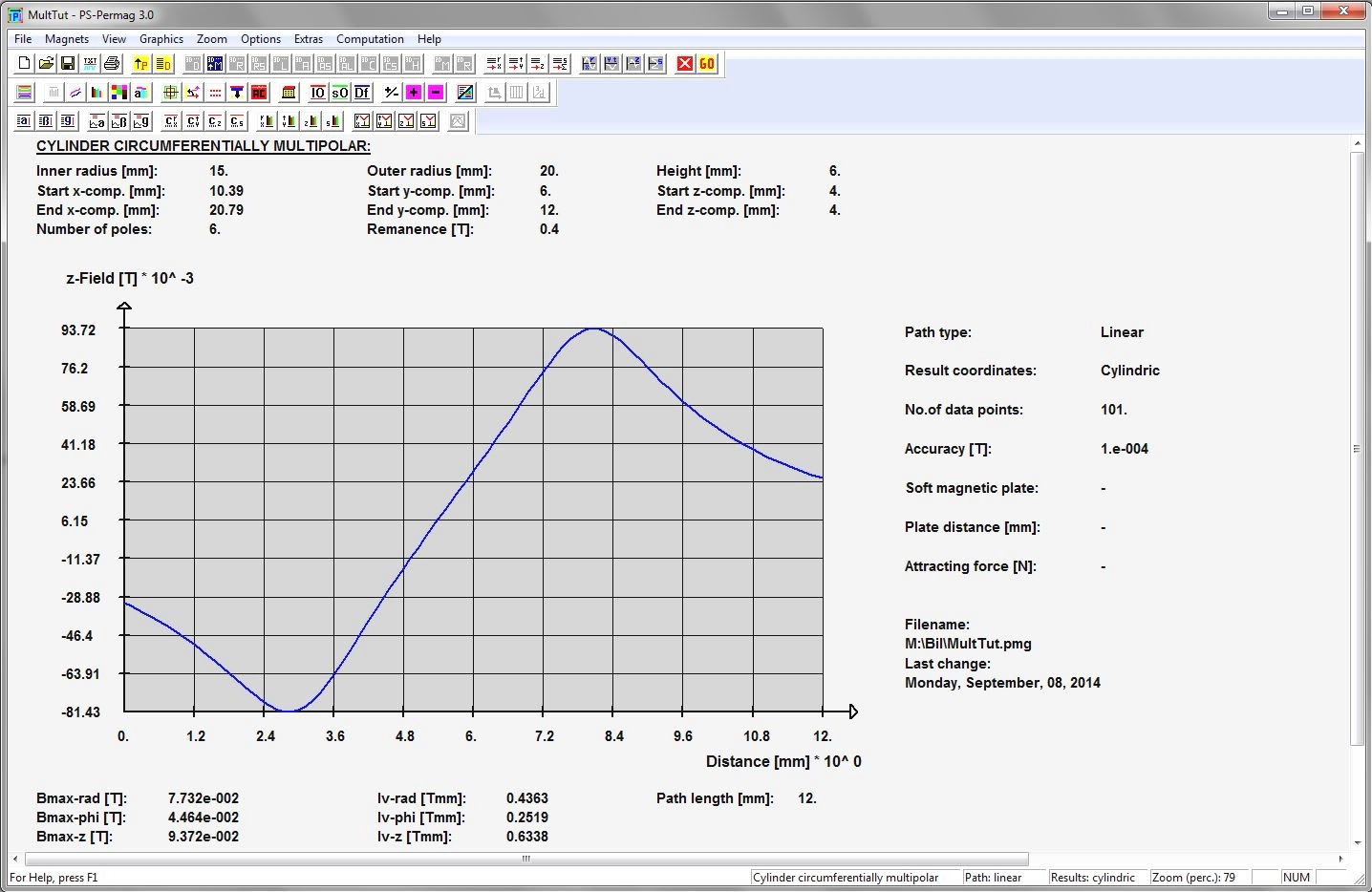
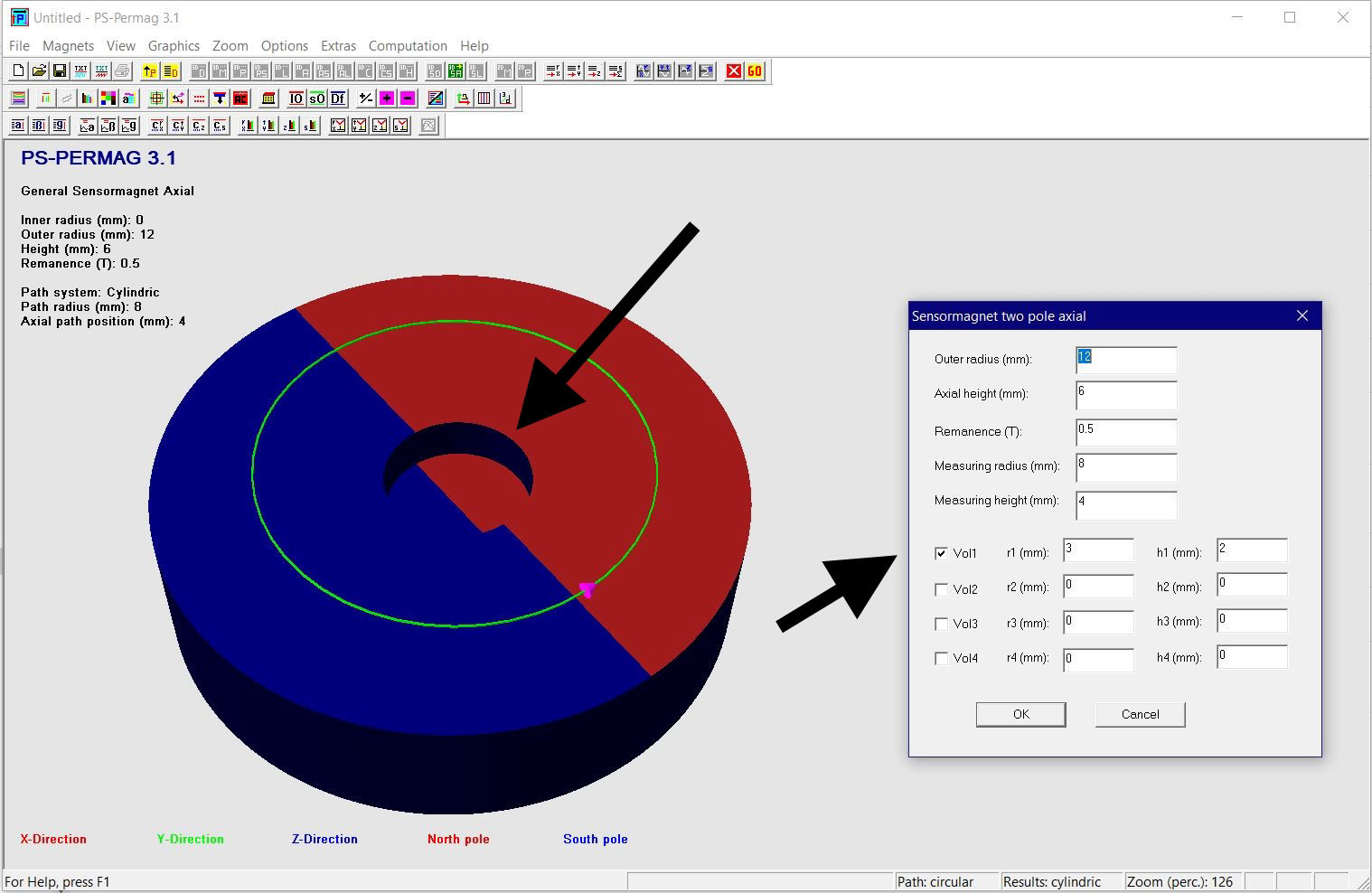
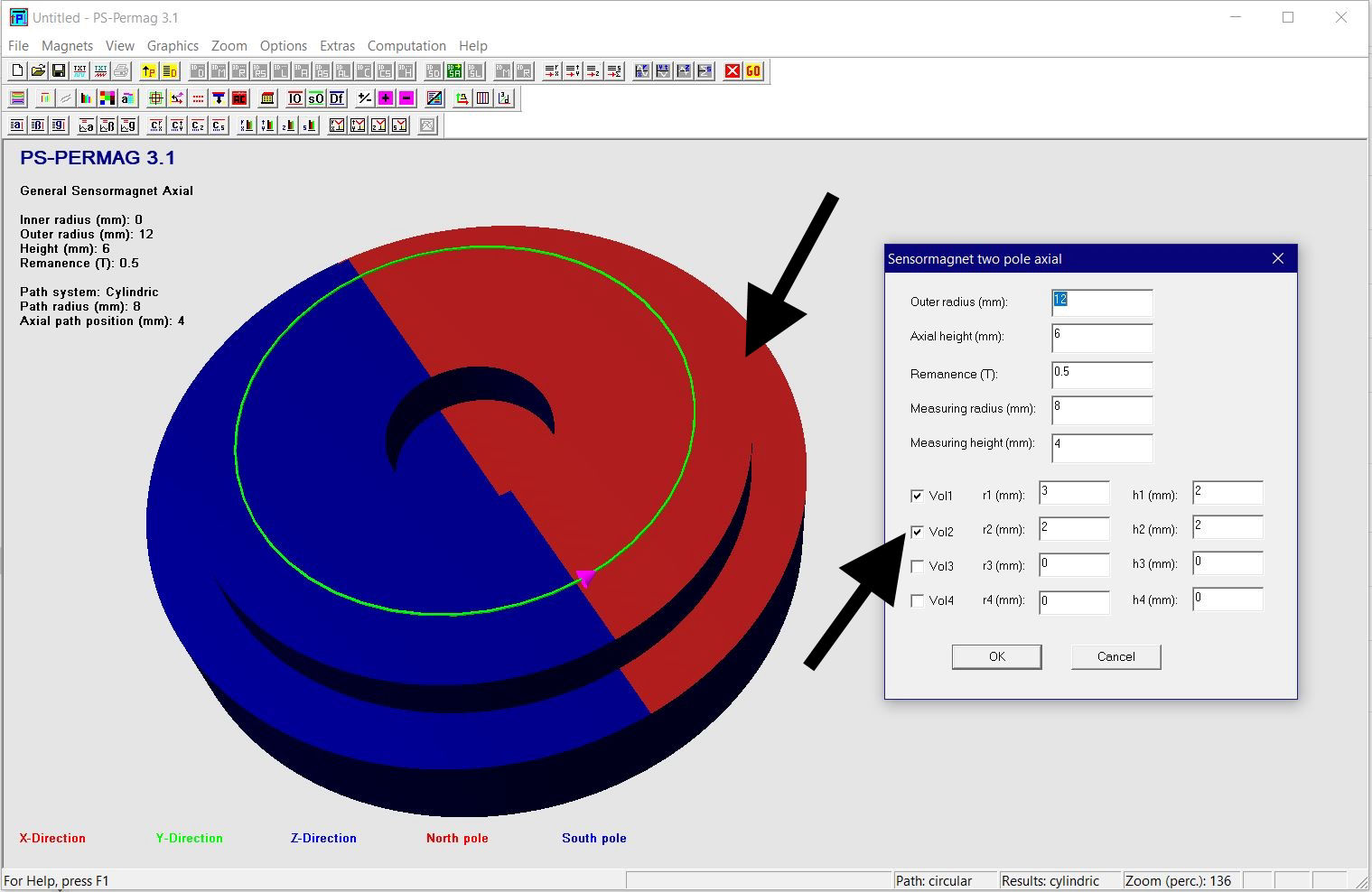
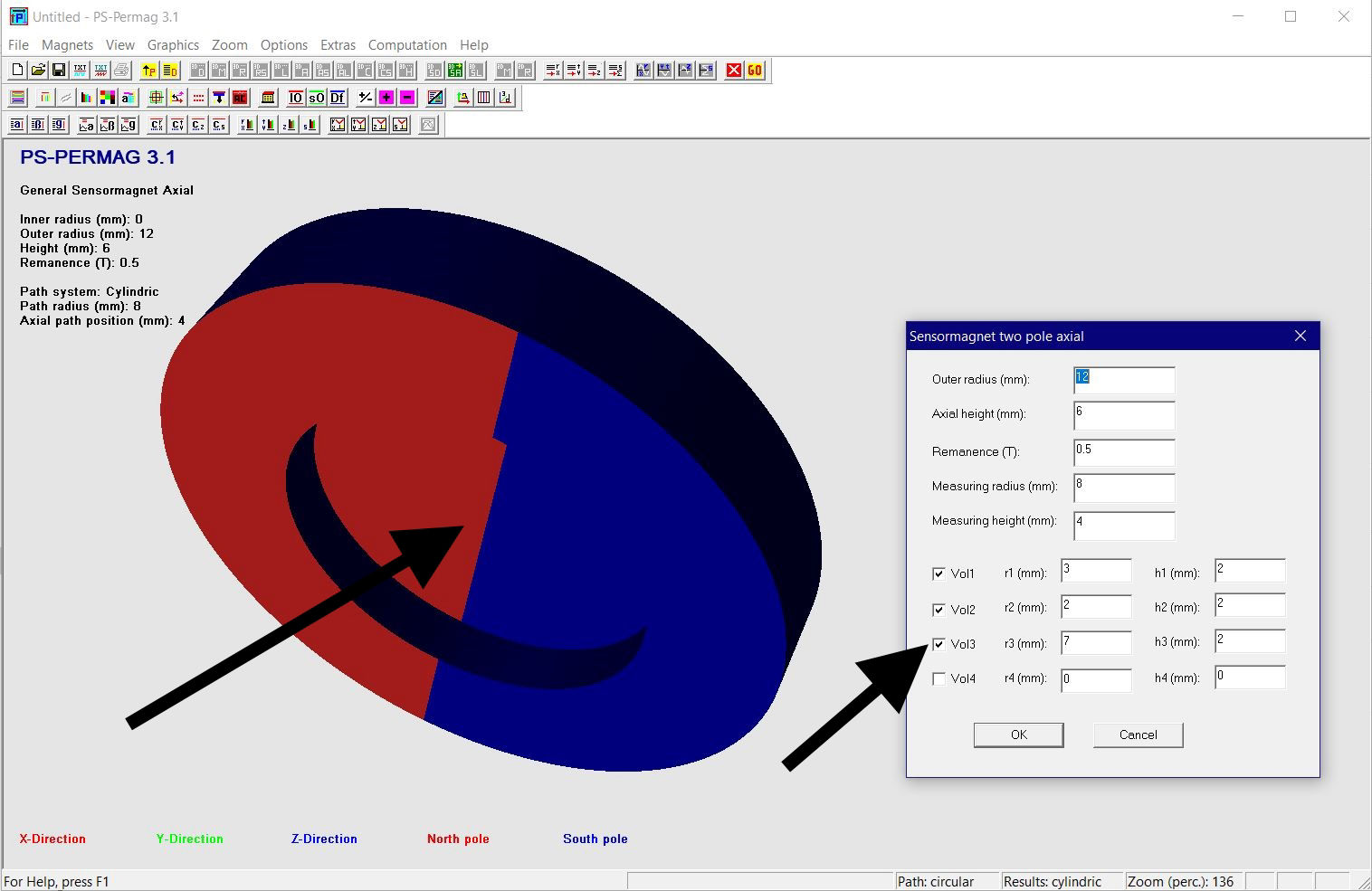
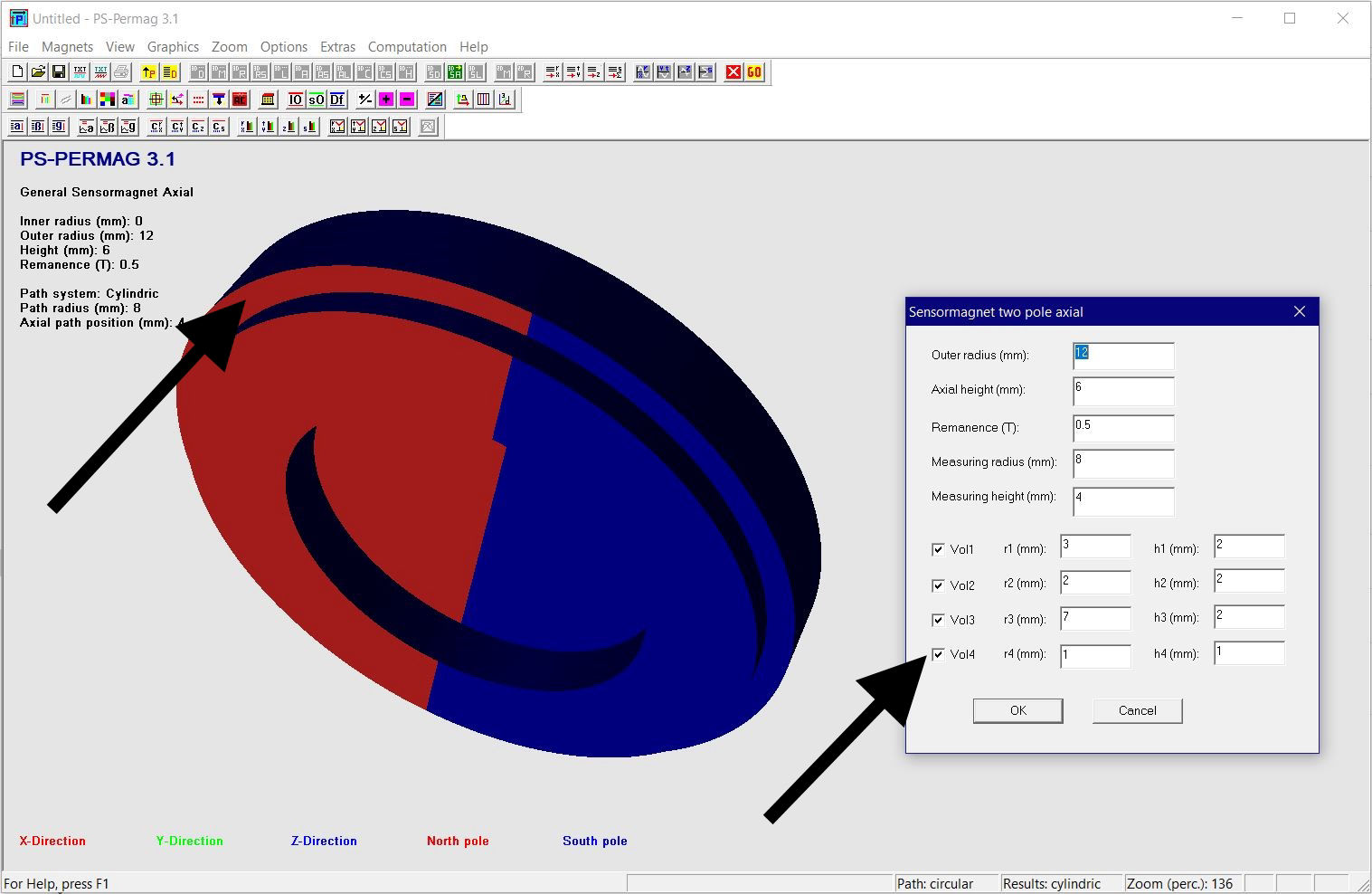
Dieses Tutorial zeigt die grundlegende Handhabung von PS-PERMAG sowie dessen Eigenschaften. Das Berechnungsproblem besteht hier in einem aus sechs anisotropen Ferritsegmenten hergestellten Zylinder, wobei jedes Segment eine Remanenzinduktion von 0.40T aufweist. Das Tutorial zeigt die Bedienung hier anhand der Version 3.0. Das unten stehende Beispiel sowie ähnliche Probleme lassen sich auch mittels der aktuellen Demoversion von PS-PERMAG und natürlich auch mit der Vollversion von PS-PERMAG3.1 ausführen. Die in diesem Tutorial nicht explizit gezeigten Features sind außerdem leicht anhand des ausführlichen Hilfesystems der Software erlernbar. Das Tutorial 3.1 weiter unten zeigt die Eingabe von zusätzlichen Vertiefungen und Rändern bei zweipoligen Sensormagneten, welche in Vers. 3.1 neu eingefürt wurden.
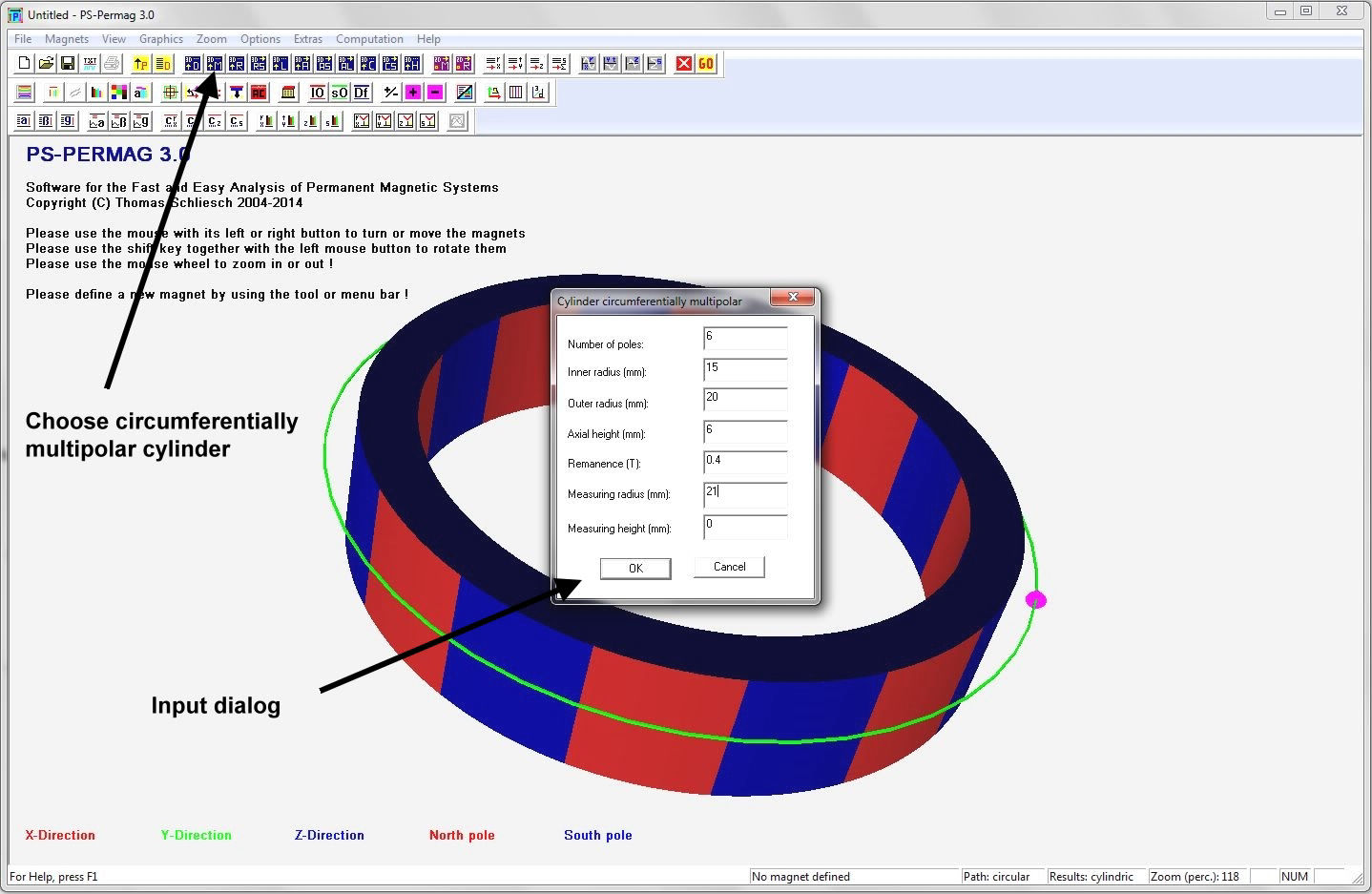
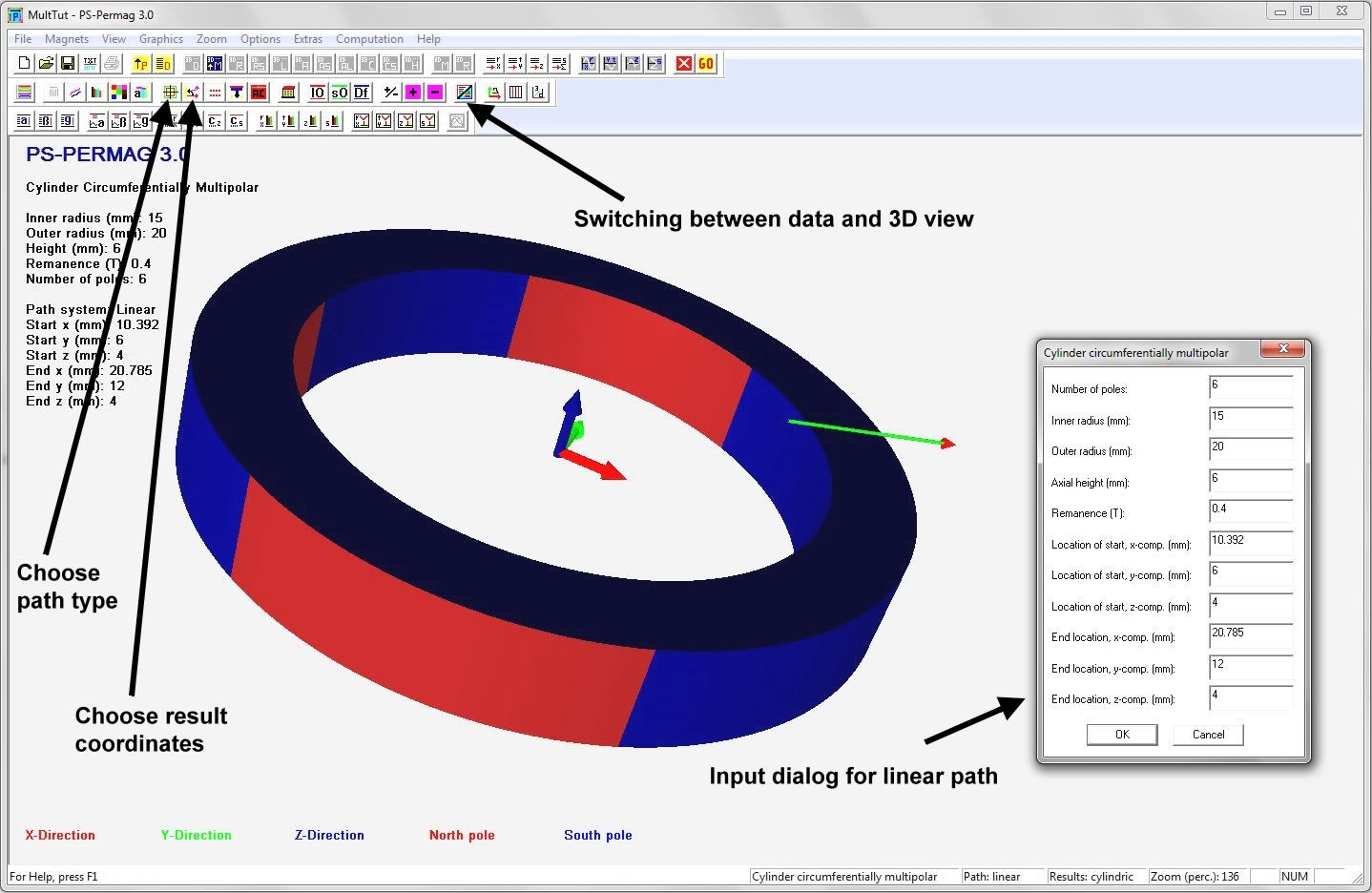
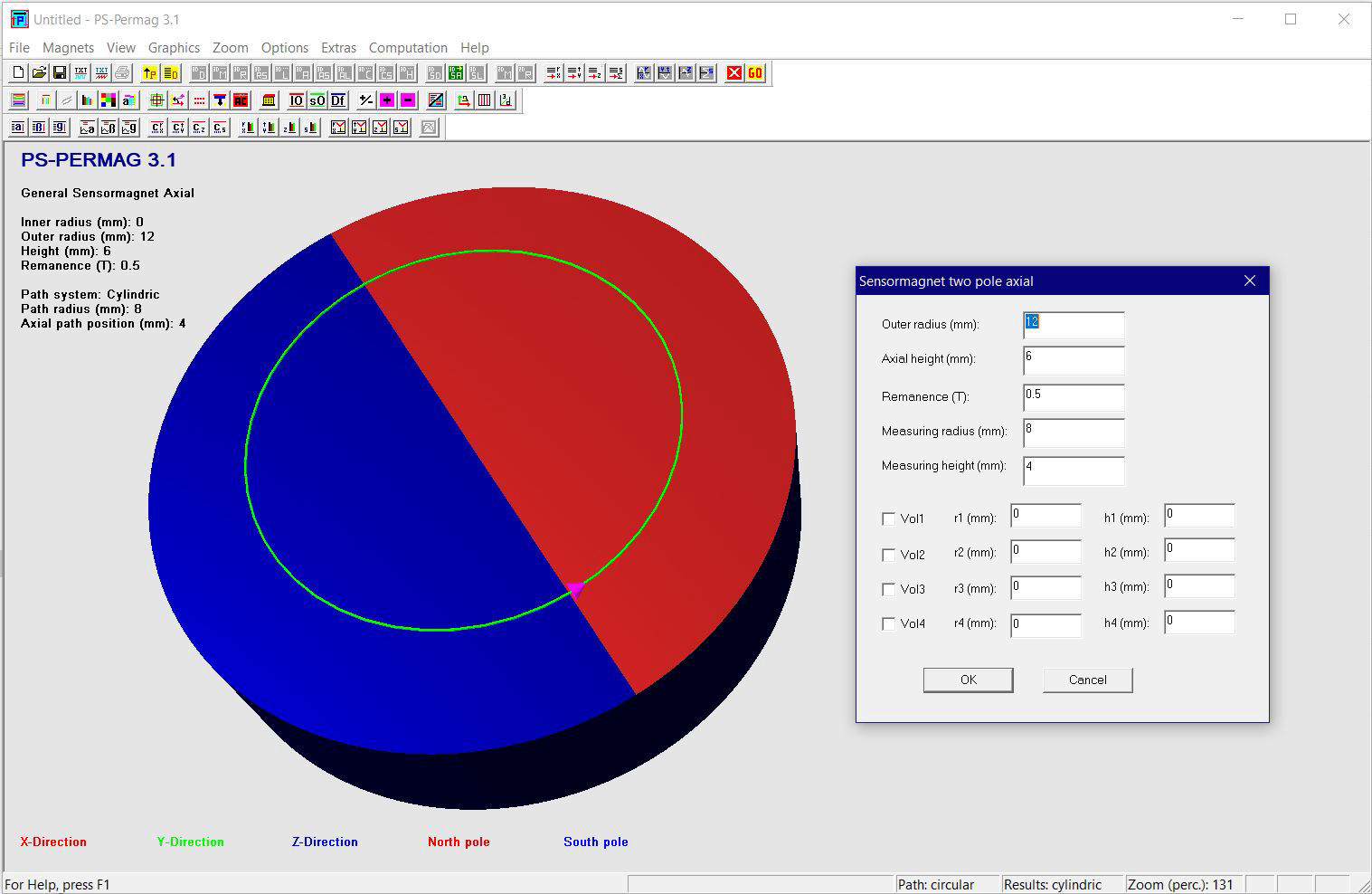
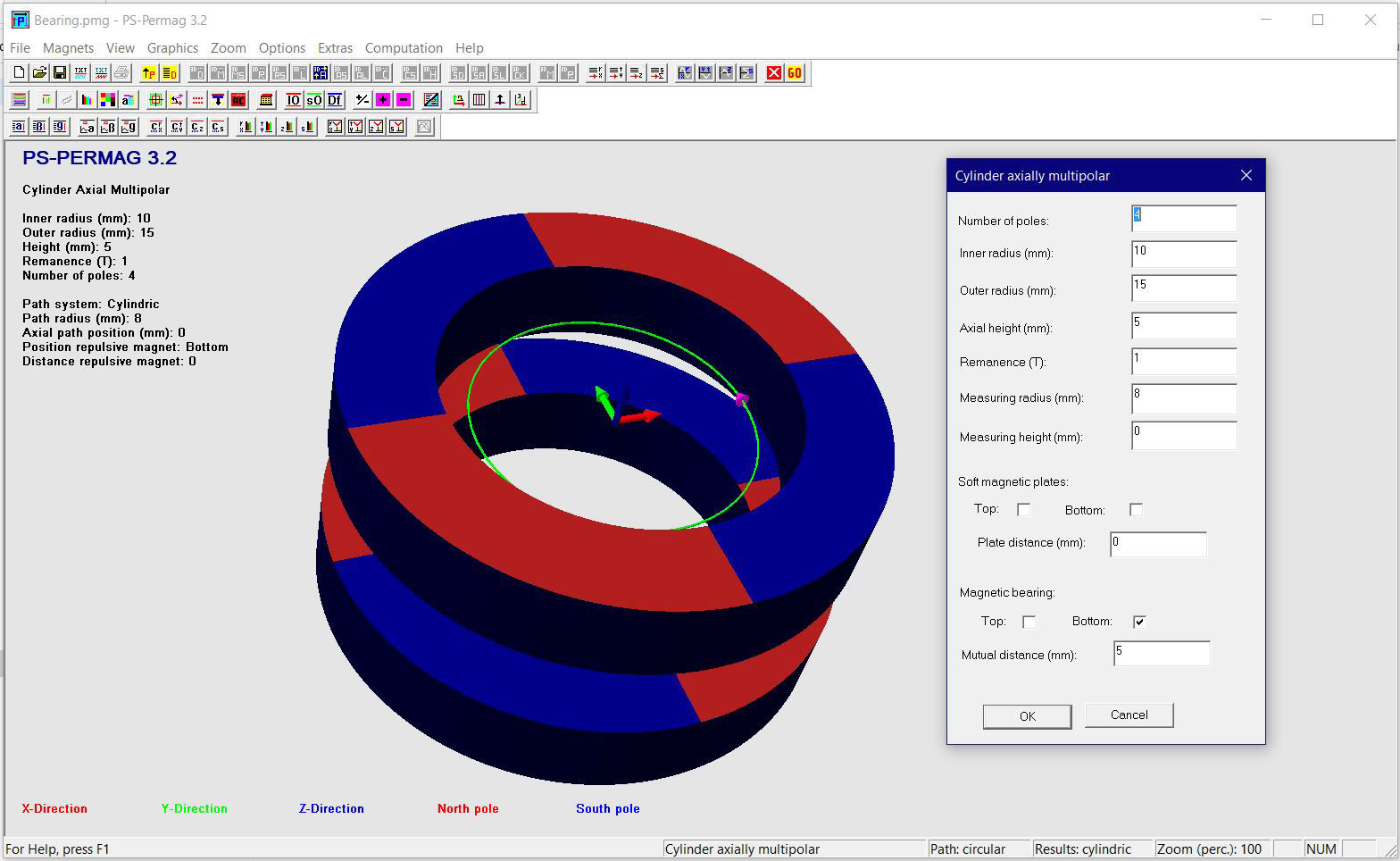
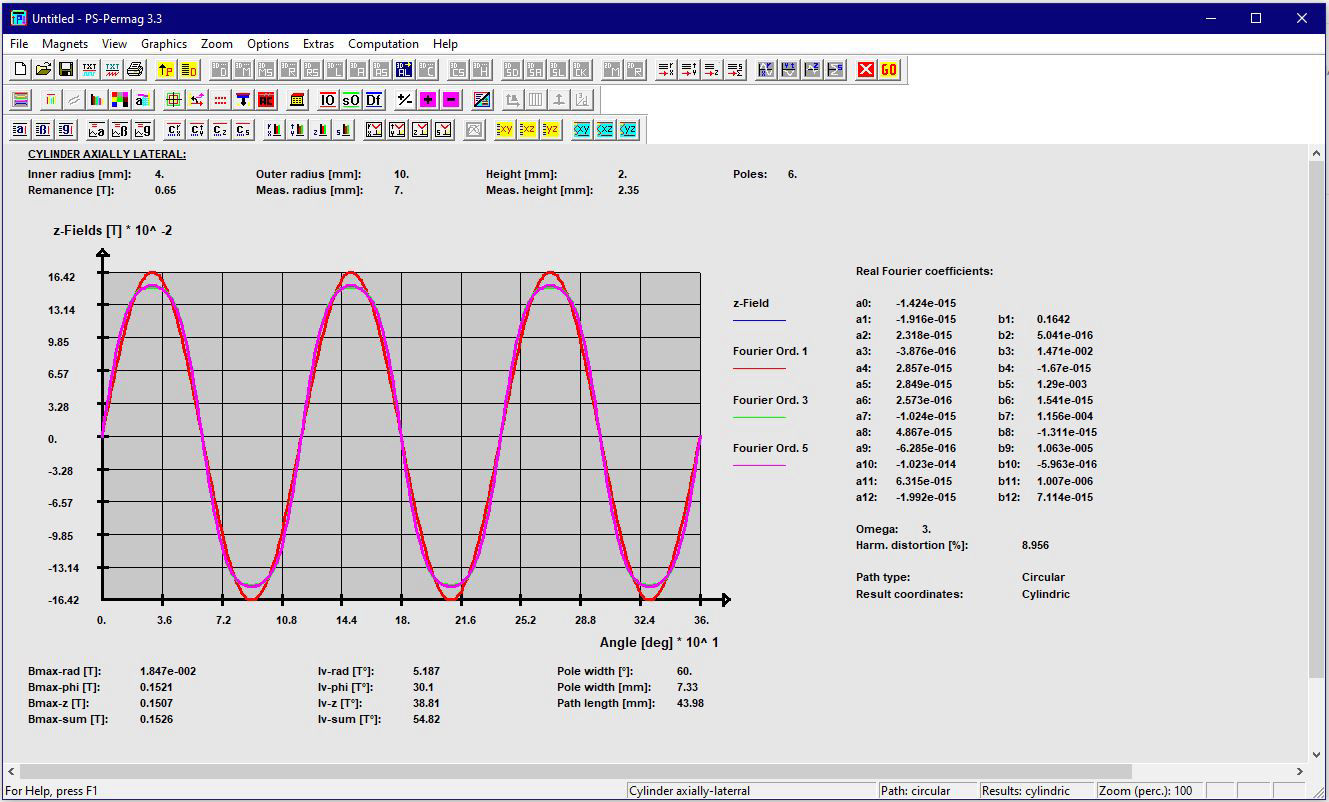
Nach dem Programmstart von PS-PERMAG erscheint zur Illustration ein 3D-Modell eines Dauermagnetzylinders. Zur Definition eines neuen Magneten klicken Sie bitte auf das M-Symbol in der oberen Symbolleiste der Software, welches für am Umfang multipolar homogen magnetisierte Zylindermagnete steht, siehe nächstes Bild. Dies öffnet einen entsprechenden Eingabedialog, in den die grundlegenden Parameter für diesen Magneten eingegeben werden. Basis für die Eingabe der Magnetparameter ist im Fall von Zylindermagneten ein zu diesen symmetrisches zylindrisches Koordinatensystem. Dies bedeutet zum Beispiel, dass auf halber axialer Höhe des Magneten immer z=0 ist. Beim Winkel phi=0 beginnt jeweils immer ein nach außen weisender Nordpol.